
Introduction
Le Badin est un manomètre donc je n’écrirai pas « anémomètre » pour désigner le Badin.
Le pilote de l’avion a besoin de connaitre la pression dynamique du vol pour piloter son avion avec sécurité. Cette information est particulièrement indispensable pour la phase finale de vol avant l’atterrissage. Nous discuterons de l’indication du Badin, instrument extrêmement important pour la sécurité.
Il faut de la pression pour assurer la sustentation. Si la pression du vol est faible, il y a des risques de décrochage aérodynamique en vol, de perte de controle, de perte d’altitude, évènements hasardeux que l’on doit éviter.
Si la pression est trop forte, il y a des efforts sur la structure ; les structures les plus sensibles étant les volets, les portes et les risques de flutter à effets catastrophiques
(certains ULM, mal réglés ou mal équilibrés, peuvent avoir du flutter à 180km/h). Il y a donc des pressions dynamiques à ne pas dépasser dépendant de la configuration volets sortis ou volet rentrés. Le lecteur comprendra que les efforts dans la structure des avions sont directement liés à la valeur de la pression dynamique, d’où l’existence de plusieurs pressions q maximales, indiquées parfois sur le Badin, à ne pas dépasser (VNE, VA, VFE, VLO…).
L’instrument utilisé est le Badin du nom de son inventeur, il aurait dû s’appeler manomètre ou, pourquoi pas, vitesse pression comme l’altimètre pression.
Les anciens auraient dû graduer le Badin en mm d’eau car c’est de la pression dont on a besoin pour rester en l’air à 1 g ou plus.
Plus l’avion est lourd, plus la surface est petite, plus la charge alaire est importante plus il faudra de pression pour porter l’avion.
Le décrochage d’un avion se produit pour une vitesse faible, très proche de la vitesse V telle que la relation suivante est satisfaite.
N x mg = ½ ρ SV²Czmax
- n le facteur de charge (n est égal à 2 quand « on prend 2 g », comme l’on dit familièrement)
- m est la masse de l’avion en kg
- g est l’accélération de la pesanteur 9.81 m/s²
- S est la surface de la voilure en m²
- ρ en kg/m³ est la masse volumique de l’air
- Czmax est un coefficient sans dimension dépendant de la forme de la voilure, donc de la position des volets, du centrage et de la puissance du moteur qu’on ne peut pas dépasser.
Quand la vitesse décroît, le décrochage se produit donc pour: q=nmg/SCzmax, c’est-à-dire pour une indication unique (si la masse est la masse maximale, n = 1 et le moteur réduit !) du Badin nommée Vs «vitesse minimale » ou vitesse de décrochage. Le pilotage d’un avion se fait en gardant des marges par rapport à Vs.
Au lieu de graduer le manomètre de pression dynamique en unité de pression, il est gradué en vitesse de telle façon qu’il indique la vitesse vraie pour un mobile se déplaçant dans une atmosphère identique à celle de l’altitude 0 m de l’atmosphère standard (où ρ=1.225 kg/m3).
Finalement on peut lire en approche finale 120 km/h ou 65 kt, il aurait fallu lire 680 Pa ou 68 mm d’eau.
Pression dynamique notée q:
La pression dynamique est la différence entre la pression totale et la pression statique.
q = ½ ρ V²
Tube Pitot prise de pression totale
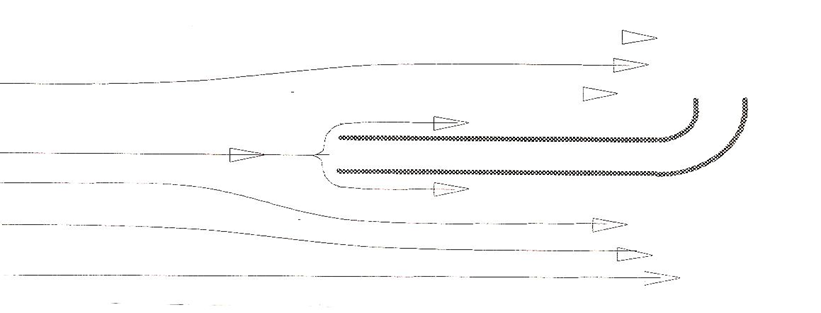
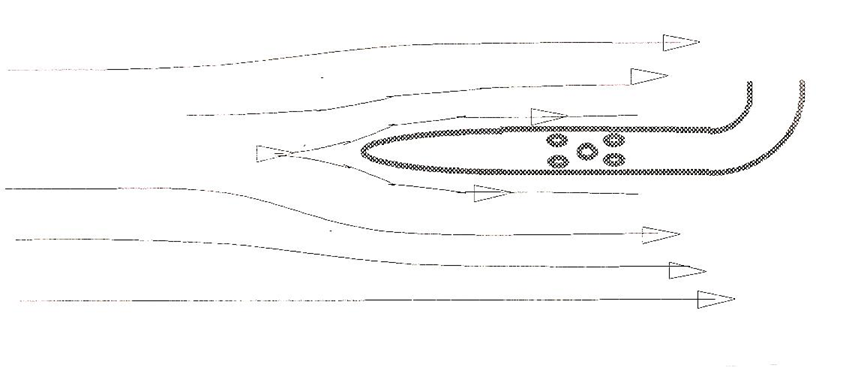
Il s’agit d’un simple tube, appelé tube Pitot, du nom de son inventeur marin, ou sonde de pression totale ; il existe une ligne de courant qui se ralentit devant le tube, s’immobilise en un point d’arrêt tandis que le reste du fluide se divise de part et d’autre pour contourner le tube.
Pression totale notée pt :
C’est la pression du petit volume d’air quand il a été ramené au repos dans l’avion par un procédé irréversible, sans perte par viscosité ou autre.
Pression statique notée p ou ps :
C’est la pression au sein de l’air en mouvement.
On va mettre en opposition la pression totale et la pression statique dans un capteur de pression du Badin. Le capteur est une membrane qui se déforme avec la pression. Le déplacement est amplifié et est affiché au pilote par une aiguille avec un Badin mécanique, sinon une chaine électrique : jauge de contrainte, amplificateur et affichage numérique qui donnent l’indication avec un EFIS.
Les erreurs de mesure du Badin proviennent :
- de la prise de pression totale
- de la prise de pression statique
- de l’instrument
- du diamètre des tuyaux
Une mesure doit être reproductible et précise.
Pour conserver une marge en référence de la vitesse de décrochage, on a surtout besoin de reproductibilité. Les systèmes électroniques modernes permettent de calculer à bord la vitesse et la direction du vent ; pour cette fonction, il y a besoin d’une anémométrie très précise.
La pression statique est encore utilisée pour mesurer l’altitude pression, mesure obligatoire pour la navigation en altitude et zone contrôlée. Pour les avions certifiés, il est obligatoire d’avoir une bonne précision de la mesure de l’altitude pression puisque cette mesure est utilisée pour la séparation des avions en vols. On se demande pourquoi les ULM et avion amateur n’ont pas cette démonstration de précision à faire alors qu’ils peuvent évoluer en espaces contrôlés à plus de 250 km/h pour certains.
Définition de la vitesse conventionnelle Vc ou CAS, Calibrated Airspeed »
Au lieu de graduer le Badin de pression dynamique en unité de pression (Pascal, ou millibar ou mm d’eau), il est gradué en vitesse de telle façon qu’il indique la vitesse vraie pour un avion se déplaçant dans une atmosphère identique à celle de l’altitude 0 m de l’atmosphère standard.
La vitesse conventionnelle est la vitesse calculée pour une masse volumique de 1.225 kg/m3 correspondant à la pression dynamique donnée par un manomètre parfait qui serait alimenté parfaitement par les vraies pressions totale et statique.
La « vitesse indiquée» Vi est différente de la vitesse corrigée Vc du fait des erreurs de l’instrument et des erreurs des mesures de la pression statique et éventuellement de la pression totale.
La « vitesse indiquée » Vi est différente de la vitesse vraie, « True air speed » (TAS), en raison de la masse volumique de l’air. En plus de l’erreur de statique, l’avion ne vole que très rarement dans les conditions correspondant au principe de graduation de l’anémomètre décrit ci-dessus. C’est uniquement dans ces conditions (par exemple T = 15 °C et p =1013.2mb) que l’on a TAS=V=Vc.
De par sa simplicité l’anémomètre reste le moyen économique sur les avions peu rapide de connaître la vitesse vraie à l’aide de la relation de Bernoulli.
Selon la formule : q = pt – ps = pression dynamique = 1/2 ρ V²
Ce qui permet de calculer la vitesse vraie, TAS.
ρ TAS²=1.225 Vc² en écoulement subsonique
En l’absence d’un EFIS complet, un calculateur de la vitesse vraie peut se trouver dans un menu du GPS.
On peut aussi utiliser la formule approximative suivante et ajouter à la Vi :
- 1% pour 600 ft d’altitude
- 1% pour 5 °C de plus que l’atmosphère standard.
- la correction de Vi du manuel de vol.
Note : on rappelle que :
mesure vraie = mesure indiquée + correction = mesure indiquée – l’erreur
Exemple : le compteur de ma voiture indique plus que la vitesse réelle : il a une erreur de 6 km/h et une correction de – 6 km/h.
Les erreurs de la mesure de la pression dynamique
Les erreurs de la mesure de la pression dynamique proviennent :
- de la prise de pression totale : le Pitot
- des prises de pression statique (« static port » en anglais) ou de la prise quand elle est unique.
- de l’instrument Badin lui-même
De la prise de pression totale
Un tuyau en aluminium coupé droit fait parfaitement l’affaire. La courbe suivante donne la sensibilité en incidence ou en dérapage de la mesure de pression totale. Si on ne veut pas d’erreur significative, il ne faut pas dépasser 15° d’incidence locale.
| Incidence (ou dérapage) locale du Pitot en degré | correction en km/h à 70 km/h | correction en km/h à 120 km/h |
| 0 | 0 | 0 |
| 10 | 0 | 0 |
| 20 | 0 | 1 |
| 30 | 3 | 5 |
Sur certains ULM, le tube est mis devant le bord d’attaque de l’aile. Le décrochage se faisant aux environs de 16° d’incidence de l’aile, l’incidence locale du tube de pression totale Pitot est amplifiée par l’ascendance due à la portance : l’incidence locale de la sonde peut atteindre 30°, la mesure de pression totale est fausse (plus faible que la réelle) ce qui facilite l’obtention d’une vitesse indiquée de décrochage mesurée faible, satisfaisant la norme de vitesse de décrochage de 65 km/h maximale. Il doit être envisagé de monter le tube avec un calage à piquer de 10° au moins.
La prise de pression totale est mise sous l’aile en dehors du champ de l’hélice ; il n’y a pas d’erreur car la ligne de courant est environ parallèle à l’aile et au tube Pitot. Cependant en fort dérapage une erreur de totale apparaît ; ce qui est le cas de la glissade qui conduit au risque de décrochage de l’aile sous le vent, avec une vitesse indiquée plus faible que la Vc.
La prise de pression totale doit être en dehors de la couche limite (perte de pression totale) et bien sûr, hors du souffle de l’hélice (plus de pression totale dans le souffle hélice et variable avec la traction de l’hélice).
Le meilleur endroit est sous l’aile genre DR400, près de l’intrados parallèle à ligne externe du profil, sortie de la couche limite. La sonde est insensible à l’incidence et elle est peu sensible au dérapage. Grosso modo 1 degré de dérapage c’est 1 degré de gouverne de direction, donc il est possible de dépasser 15 degrés en dérapage (cas de la manœuvre appelée parfois glissade).
On voit des sondes de prise de pression totale avec des bouts ronds, je ne connais pas de courbe de calibration pour ces sondes, mais encore une fois le tube coupé droit est meilleur en incidence/dérapage. Les tubes réchauffés doivent être plus efficaces en chauffage avec un bout aminci, ce qui doit expliquer leur forme. Un fournisseur propose un tube droit réchauffé avec une petite consommation. Réduire le diamètre du tube Pitot réduira la consommation du réchauffage (voir chapitre sur les tubes).
De la prise de pression statique
On doit savoir qu’il n’est pas possible de mesurer avec précision la pression statique de la masse d’air dans laquelle évolue l’avion.
En effet, la pression statique de la masse d’air dans laquelle évolue l’avion est celle en amont de l’avion, disons deux longueurs devant l’avion ; la prise de statique se trouve dans une zone où la vitesse de l’air est perturbée par l’avancement et les formes de l’avion, c’est-à-dire une zone de survitesse ou une zone de sous-vitesse.
La vitesse locale dépend :
- des formes de l’avion (fuselage, nez, aile)
- de l’incidence de l’avion
- du dérapage de l’avion
- du braquage des volets
- de la puissance du moteur et hélice
- parfois de la sortie du train
- de la qualité de la réalisation de la sonde de statique
Il est donc très difficile de trouver une bonne prise de pression statique.
La pression statique de la masse d’air dans laquelle évolue l’avion se différencie de la mesure de pression statique par « l’erreur de statique ».
Pour les avions certifiés, cette erreur de statique est l’objet d’un étalonnage et elle se trouve dans le manuel de vol.
Erreur de pression totale cumulée avec une erreur de statique : on peut voir des systèmes anémométriques qui mesurent seulement 50% de la dynamique au décrochage, ce qui explique la déclaration de certains pilotes « l’avion décroche à 40 km/h alors que la vraie pression dynamique est de 60 km/h ».
Position des prises de pression statique
Droite et gauche fuselage AR
C’est une très bonne position ; il faut une prise à droite et une prise à gauche pour compenser les effets de dérapage, indispensable sur les avions de sport et de montagne.
On trouve les prises de pression statiques de fuselage sur la plupart des avions comme DR400, MCR, TB20…
Sur l’avion GUANYI Aviation GA20 nous avons calculé en simulation numérique les pressions locales le long du fuselage et installé les prises au meilleur endroit. Nous avons très bien réussi car l’erreur est de 1 à 2 km/h seulement.
Au niveau du cadre 1 (cloIson PF)
Cette positon est intéressante car on a des tuyaux très courts, mais la position est sensible aux effets moteurs à la mise de gaz, à la limite de l’inacceptable car la vitesse bouge au début du roulage avec du retard. ?
Il faut aussi un correcteur de l’incidence (voir plus loin). Les correcteurs du F-PTRO selon la photo permettent d’avoir une erreur de la vitesse en croisière à 4 km/h d’erreur et 2 km/h d’erreur en approche finale.
L’erreur de pression statique à cette position de la rotation de l’hélice au décollage et en montée.
Elle est donc peu précise mais elle a été certifiée sur certains Cessna.
Sous l’aile
La prise sera sensible à l’incidence du vol ; on voit sur le manuel de vol du DA 20 que cette mesure est imprécise, il y a une grosse correction rapportée dans le manuel de vol. De plus le cheminement du tuyau aile fuselage est contraignant en maintenance.
Au bout d’un tube
Tube installé en amont de l’aile
Il y a un grand risque de déformation/rupture du tube pendant la circulation autour de l’avion au sol.
Si on veut une bonne statique :
- Il faut que la pression statique ne soit pas sensible ni à l’incidence de la perche, ni au dérapage, ni à l’incidence ; donc il faut des trous dessus et dessous et sur les cotés selon le schéma ci-dessus
- il faut au moins une longueur d’une corde de tube devant l’aile, c’est très contraignant. (compter environ correction de Cp de +0.01 à 15° d’incidence)
- Il faut aussi être en extrémité de l’aile pour éviter les effets des volets.
Courbe de Kp fonction de l’incidence des volets et de la distance
Courbe Kp ou Cp
Tube installé en amont de la dérive et au sommet
En haut de la dérive cela devrait aller avec une corde de la dérive devant, Il faut que la pression statique ne soit pas sensible ni à l’incidence de la perche ni au dérapage, ni à l’incidence, donc des trous dessus et dessous et sur les cotés selon le schéma précédent. Il y a risque d’un effet moteur à forte incidence.
Ce capteur de pression en haut de la dérive n’est pas commode pour la maintenance.
Le cÔne remorqué
C’est un équipement qui ressemble à la corde de remorquage des avions remorqueurs. Cet équipement est utilisé pare les essais en vol AIRBUS pour la calibration de la pression statique des avions en certification.
Dispositifs correcteur de la mesure de pression statique
Il est possible de corriger la mesure de la pression statique, et principalement de l’effet de l’incidence avec deux types de dispositifs.
Sur le F-PTRO j’ai installé des ailettes de type delta à incidence réglable. : quand on augmente l’incidence des ailettes on diminue la vitesse pression.

Une autre solution simple est une marche derrière ou devant la prise de pression statique ; si la marche est derrière on diminue la vitesse pression. Si la marche est devant la prise, on augmente la vitesse pression.

L’assiette de la marche (par exemple assiette à 30°) doit pouvoir compenser l’effet de l’incidence (quand la vitesse augmente l’incidence diminue en palier) pour les prises installées sur le flanc du fuselage, ce système de correction est très facile à réaliser.
Pour le réglage de la correction de statique, voir le chapitre sur la calibration.
De l’instrument.
Les instruments Badin et altimètre pression sont en général très précis mais il y a lieu de vérifier leur calibration ce qui n’est pas fait par les fournisseurs ; ils devraient livrer chaque instrument avec sa courbe de calibration. MGL avionics permet de régler la calibrations du capteur.
L’important est que la mesure soit reproductible, que la mesure soit avec peu d’erreur avec le temps, la température, l’altitude.
La dynamique de l’instrument est aussi à évaluer, je n’aime pas trop la dynamique du GARMIN G5. De plus, je suis un conservateur, je préfère un Badin mécanique avec une aiguille.
Du diamètre des tuyaux
Il est possible de réduire le diamètre des tuyaux. La limite est la dynamique de la mesure.
J’avais fait un montage du tube de pression du Pitot avec un tube que l’on trouve dans les hôpitaux. Le diamètre était trop petit et en manœuvrant rapidement à piquer et à cabrer, je voyais l’évolution de la vitesse à l’inverse de l’évolution normale.
Il ya une relation entre la longueur du tube et le diamètre à respecter. La longueur doit être inférieure à 2000 fois le diamètre interne ( ID). Cette règle s’applique aux tuyaux longs pour la transmission de l’information de pression et de la fluctuation de pression en fonction du temps. Le diamètre de la prise peut être très petite (ID= 2mm, donc on peut faire un tube Pitot avec un tuyau en acier de 2mm de diamètre, attention aux blessures au sol). La variation peut être de 4 km/h en une seconde: le Badin doit vous indiquer cette variation.
Il faut penser à la conception que de l’eau peut pénétrer dans les tuyaux. L’eau ne va pas modifier la mesure de la pression. L’installation des tuyaux peut éviter que l’eau stagne et/ou s’accumule dans les tuyaux.
Le drainage est sans intérêt, bien qu’exigé par la certification.
Tout le monde connait l’efficacité des mouches maçonnes pour boucher un tuyau à 100% profondément en quelques heures. C’est la panne la plus fréquente des tuyaux pour les pilotes qui voyagent. Il faut penser à la maintenance pour un dépannage rapide.
Ces mouches m’ont mis en panne une fois toute les 1000 hdv. La première fois j’ai fait le vol avec le Badin en panne et une sortie de piste sur le terrain d’arrivée. Il faut se renseigner sur la présence des mouches.
vérifier la mesure de q, fuites, calibration q et Zp
Vérification périodique
Il est possible de souffler avec la bouche dans le Tube de pression totale, pas trop fort, il faut s’entrainer et une personne doit vous aider pour voir l’indication de l’instrument. Il est possible aussi d’aspirer dans la prise statique en collant un adhésif étanche orange de carrossier sur l’autre prise statique.
Cette méthode peut être utilisée pour vérifier qu’il n’y a pas de fuite.
Calibration du Badin
introduction
Pour un avion nouveau on procédera dans l’ordre : calibration de l’instrument Badin, calibration de la pression statique en vol.
calibration de l’instrument Badin
Si on ne dispose pas d’un outillage professionnel, on peut calibrer l’instrument Badin avec un manomètre à tube à eau (que l’on peut fabriquer soi même) un réglet en mm, des tuyaux transparents.
Cela peut se faire sur l’avion.
| pression | pression |
| Badin en km/h | mm d’eau |
| 100 | 47,3 |
| 140 | 92,6 |
| 250 | 295,4 |
Calibration de la prise de pression statique
Si on a choisi la bonne position du paragraphe pour la pression totale, il n’y a pas d’erreur de pression totale, l’erreur de la pression dynamique sera celle de l’erreur de la prise de pression statique.
On utilisera le GPS en faisant des allers et retours sur une base, de préférence sans vent ou peu de vent, en comparant vitesse indiquée du Badin et vitesse sol GS moyenne de l’aller et retour. Il faut bien sûr calculer la vitesse vraie TAS à partir de la vitesse indiquée, la température et l’altitude pression (voir plus haut : Définition de la vitesse conventionnelle.)
Avec un peu d’habitude on arrive à faire la mesure de la correction de statique en km/h mentalement en vol.
On retourne au terrain, on modifie le réglage du correcteur de statique et on refait une mesure. Sur un aérodrome calme, avec des circuits courts ce procédé prend peu de temps.
Si l’objectif est de mesurer le vent en vol, il faudra choisir entre la correction pour l’approche finale ou la croisière (encore que le GA20 montre très peu d’erreur volets sortis donc on doit pouvoir avoir un calculateur de vent précis dans tout le domaine de vol).
Les mesures GPS permettent de calibrer la vitesse air à peu de frais.
Les équipements minimaux nécessaires sont un GPS, un thermomètre (celui de la mesure de la température extérieure « OAT » de l’avion), un altimètre soit barométrique (celui de l’avion) ou GPS (fonction altimètre).
Mais il est possible d’ajouter :
- un récepteur GPS avec enregistrement (cela peut être simplement un MGL ou un GARMIN ETREX sans capacité barométrique). Sur le F-PTRO, j’utilise le MGL Extreme. Après le vol je calcule TAS calculé d’après la vitesse indiquée, pression atmosphérique du vol et OAT et je compare à GTAS, la GS modifié par le vent à l’altitude du vol en direction et vitesse calculé d’après les enregistrements.
- une caméra vidéo.
Un enregistreur GPS est important si vous volez en solo. Vous devez vous concentrer sur la sécurité et la conservation de l’altitude.
Procédure de test :
- l’atmosphère doit être calme avec peu de vitesse verticale
- stabiliser l’avion en vol horizontal à la vitesse de test, ce qui prend du temps
- voler à attitude constante et dans la même zone
- noter la route donnée par le GPS
- voler à vitesse constante pour au moins 20 s
- noter la vitesse sol (GS) qui sera moyennée en vol ou après si les mesures sont enregistrées
- noter aussi la vitesse indiquée Vi par le Badin qui sera moyennée en vol ou après si les mesures sont enregistrées
- répéter les opérations de (2) à (5) avec une route opposée à 180 degrés, dans la même zone si possible.
Données à enregistrer à chaque série de test :
- position de volets hypersustentateurs
- puissance du moteur
- route, TRACK
- vitesse air moyennée
- vitesse sol moyennée issue du GPS
Compensation des données GPS
La vitesse conventionnelle CAS est calculée après vol selon la logique suivante.
Pour chaque vitesse concernée :
- Calculer TAS moyennée à partir de la vitesse sol issue du GPS selon deux routes opposées ; J’appelle cette TAS la GTAS : c’est la GS du GPS corrigée du vent. Le vent local sera extrait de ces deux phases en routes inverses
- Calculer la vitesse conventionnelle CAS (notée aussi Vc, vitesse conventionnelle ou vitesse corrigée) à partir de la vitesse air (TAS) par correction de la densité de l’air connue en fonction de l’altitude et de la température extérieure (OAT). On utilise la formule de Bernoulli selon le paragraphe « Définition de la vitesse conventionnelle ».
La différence Vc – Vi est la correction à apporter au Badin.
La table de correction peut être établie pour chaque position des volets.
Cette méthode peut être utilisée pour calibrer les vitesses depuis VNE jusqu’à Vs+10 km/h, Vs étant la vitesse minimale.
Si l’instrument Badin a été calibré et n’a pas d’erreur, si la prise de pression totale est bien placée donc sans erreur, l’erreur du Badin relevée selon la méthode précédente sera l’erreur de statique. Elle permettra de calculer l’erreur de l’altimètre.
Note si l’erreur de statique est de 15 km/h ce qui est possible sur un avion rapide, à 250 km/h, l’erreur de l’altitude pression sera de 100 ft.
On pourrait démontrer que la chaine de l’altimétrie par erreurs cumulées de la prise de statique, erreur de l’instrument altimètre, erreur physique du calage altimétrique peut atteindre une erreur de 300 ft d’altitude pression en altitude sans compter l’imprécision du pilotage.
Le GPS standard mesure l’altitude géométrique avec une erreur de 75 ft avec une DOP of 1 pour 95% confiance en mode normal. La différence entre l’altitude géométrique du GPS et l’altitude pression sera au maximum de 6%, en dessous de 3000 ft avec les températures connues en France, soit un maximum de 200 ft. Tenir l’altitude assignée par le contrôle est aussi précis avec le GPS que l’altimètre barométrique en dessous de 3000 ft. Note : l’altimètre pression barométrique est obligatoire en espace aérien contrôlé.
J’ai lu une note de l’aviation civile belge qui cite 500 ft d’erreur pour la chaîne de mesure de l’altitude barométrique. 500 ft est aussi la valeur retenue pour les approches de non précision en FAR25 (probabilité de 1 sur 1 milliard d’approches). Donc un croisement en niveau avec un IFR avec 500 ft de marge indiqué…
Calibration de l’instrument altitude pression
Pour calibrer la lecture de l’altitude pression il faut :
- calibrer la pression statique selon la méthode précédente
- calibrer le calage altimétrique
- calibrer la mesure de l’instrument
Calibrer la pression statique selon la méthode précédente
Nous avons vu qu’il s’agit d’une erreur qui peut aller jusqu’à 100 ft pour un avion rapide.
Calibrer le calage altimétrique
Le QNH est le calage altimétrique de l’altimètre précis qui donne l’altitude de référence du terrain, en référence du géoïde WGS84, quand l’avion est au repos au point de référence.
Cette définition de l’Organisation de l’Aviation Civile Internationale est la seule définition du QNH. Elle n’est donc pas toujours appliquée en France. Que vient faire la mer dans cette histoire ?
Le QNH sur un terrain, n’existe que s’il y a un instrument précis pour le mesurer. Pendant une période à Lasbordes il y avait 1 mb d’erreur entre Lasbordes et Blagnac ce qui est anormal pour une journée sans vent.
Cette mesure peut être faite par un organisme au sol avec un bon baromètre. Le QNH n’est pas régional, il est attaché au terrain qui le mesure.
Le calibrage du calage QNH de l’instrument se fait au sol si l’on dispose du calage QNH du terrain donné par un instrument de précision du contrôle. Il faut que l’avion soit à la même altitude que le point de référence (à Lasbordes on doit mesurer 460 ft au calage QNH si l’altimètre n’a pas d’erreur). Quand le terrain est en pente, il faut mesurer la pente sur la carte et mesurer l’altitude locale de l’instrument sur une carte du terrain.
Calibrer la mesure de l’instrument
Dans le tableau suivant on trouve quelques valeurs de l’atmosphère standard pour l’altitude pression :
| Altitude pression en ft | Pression en mb | Altitude en mm d’eau |
| 0 | 1013.2 | 0 |
| 1000 | 977.2 | 360 |
| 3000 | 908.2 | 1050 |
| 6000 | 812.0 | 2012 |
| 9000 | 724.3 | 2889 |
Il est donc possible de calibrer l’altimètre avec le calage 1013.2 mb, ou le calage corrigé de la correction établie au paragraphe précédent avec un tube à eau. Cette mesure à faire à 2 est acrobatique.
Si l’avion est équipé d’un transpondeur neuf ou ayant été calibré par la station agréée, on peut transférer en vol la calibration du transpondeur à l’altimètre de vol. Le codage du transpondeur passe de F084 à F085 quand il traverse Zp= 8500 ft en montant (Code Gillham). Il faut relever l’altitude pression et le codage transpondeur en montant au changement de l’indication du transpondeur tous les 500 ou 1000ft.
Si vous êtes un savant physicien, vous pouvez faire aussi la relation altitude géométrique GPS (l’erreur maximale d’altitude géométrique du GPS est environ de 75 ft) avec l’altitude géométrique calculée d’après l’altitude pression indiquée et la loi de température en montée.
Conclusion
Le Badin est un manomètre. Le pilote de l’avion a besoin de connaitre la pression dynamique du vol pour piloter son avion avec sécurité. Cette information est particulièrement indispensable pour la phase finale de vol avant l’atterrissage.
Le QNH est le calage altimétrique de l’altimètre précis qui donne l’altitude géométrique de référence du terrain, en référence du géoïde WGS84, ce qui n’a rien à voir avec le niveau de la mer.
Voler avec l’indication d’altitude géométrique du GPS est aussi précis que l’altimétrie au QNH en dessous de 3000 ft mais ce n’est pas légal.
La prise de statique est cause de l’erreur principale pour le Badin si le Pitot est bien placé.
Avec un GPS, le seul intérêt du compas magnétique est de calculer le vent.
Vous savez tout pour faire de votre anémométrie un outil de précision. Avec toutes ces informations vous devriez pouvoir avoir un calculateur de vent précis à 3 km/h dans tout le domaine de vol.
| q | Pression dynamique du vol | |
| Vc ou CAS | Vitesse conventionnelle ou vitesse corrigée | |
| Vi | Vitesse indiquée | |
| V ou Va ou TAS | True air speed ou vitesse air | |
| mb | millibar | |
| mm d’eau | Unité de pression, hauteur d’une colonne d’eau de 1 mm | |
| pt | Head pressure, pression totale | |
| po ou ps | Pression Atmosphérique | |
| GS | Ground speed vitesse sol | |
| Zp | Altitude pression | |
| Cp | Coefficient de pression | (p-p0)/q |
| OAT ou T | Température de l’air | |
| TRAK | Route suivie | |
| ft | Pied, unité étrange anglo-saxonne non utilisée en Chine et en Russie | |
Références :
Avion OCEANAIR TC160 essais en vol pression statique cloison pare feu, méthodes de calibration au GPS

DR400X avion essais en vol 1978 perche conventionnelle d’essais en vol, calibrée en essais en soufflerie.
EFIS et enregistreur MGL Extreme avec centrale de cap magnétique et calculateur de vent